
400-8800-268
工業生產中離不開工業質量檢測這一非常重要的環節,但是受限于產品的個性化發展,產品外形千變萬化,精細程度高。受傳統檢具的局限性,工業檢測是一個非常耗時費力的環節,對此,非接觸式三維質量檢測能很好地解決這一問題。
以鑄造行業為例,絕大多數產品幾何構造較為復雜,利用傳統檢具直接檢測產品的方式已經不能滿足工業檢測日益增長的需求。一方面傳統檢具能夠檢測的參數種類和個數有限,對于復雜的產品無法準確快速判斷其是否符合特定設計要求,另一方面檢具經過較長時間的使用會出現損耗,會直接影響產品的檢測結果。通過三維掃描獲取產品的點云數據,建立高精度的三維模型,然后利用該模型與理論模型進行直接對比,可以快速準確計算和量化產品與其設計尺寸的偏差,進而判斷產品是否合格。利用三維點云模型完成對產品的全面檢測,這種非接觸式的檢測方法解決了很多傳統測量工具無法完成的測量要求,逐步向實時處理和自動化方向發展,極大的提高了檢測工序的質量和效率。
三維激光掃描技術作為近年來飛速發展的高新技術,以其高精度、高密度、實時性和主動性的特點,正在備受業內人士的青睞。在利用三維技術檢測進行工業檢測中,對產品的三維數據獲取與三維模型的建立是鍵,高精度的點云數據和三維模型直接影響了工業檢測的精度。以RigelScan智能手持式激光3D掃描儀為例,其工作流程主要為:首先在被檢測產品上粘貼反光定位目標點,然后利用手持式激光掃描儀掃描被檢測產品,獲取原始點云數據,再由自主研發的點云處理軟件對原始點云數據進行篩選和處理,建立高精度的通用三維模型并輸出,輸出的模型即可直接導入對應的三維檢測軟件中進行檢測并輸出檢測報告。
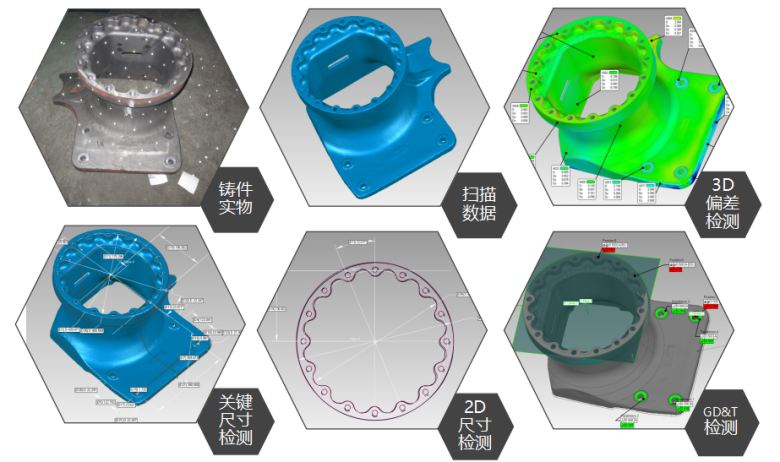
1、貼點
在被檢測工件上粘貼反光定位目標點,用于掃描儀識別定位和拼接。
2、數據采集
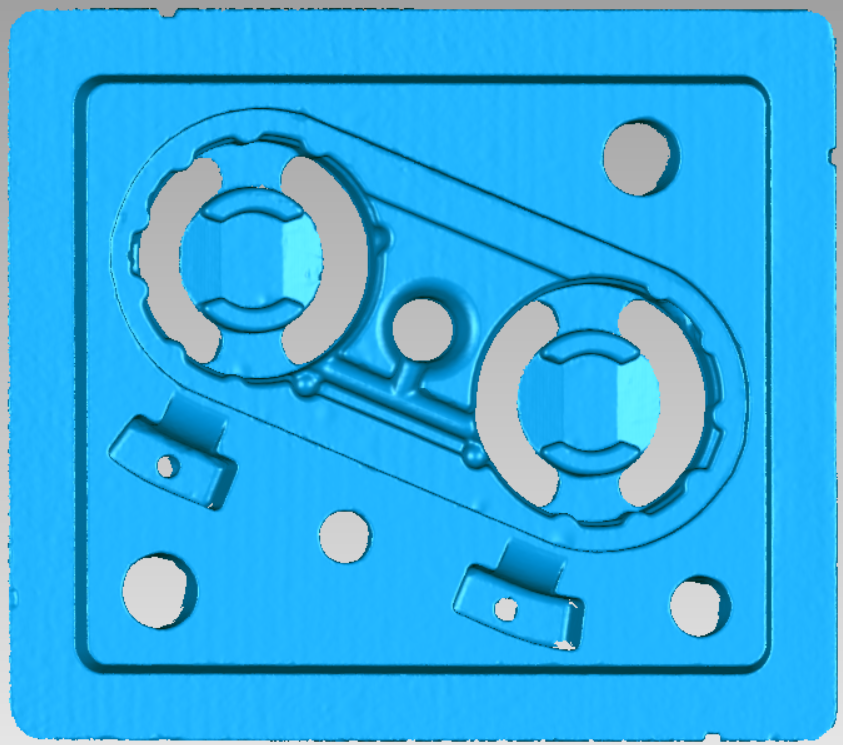
三維質量檢測的關鍵在于高精度三維模型的建立,也就是原始點云的快速獲取,采用RigelScan智能手持式激光3D掃描儀能直接快速獲取檢測工件的高精度點云數據。
3、數據處理
大數據時代,數據分析和處理的自動化和智能化需求越來越大。PCL點云庫是一個強大的模塊化的現代C++模板庫,可實現三維點云的獲取、濾波、分割、配準、檢索、特征提取、識別、追蹤、曲面重建已經可視化等功能,是一種非常專業強大的三維點云處理工具。針對不同的原始數據需求,在三維點云處理中可直接調用某些模塊化代碼庫,使用嵌入式的處理方法,高效準確地對點云數據進行處理。本例利用PCL對三維點云數據進行體素化濾波、體外點剔除和泊松構網,再結合少量的手動干預,獲取工件的高精度三維模型。
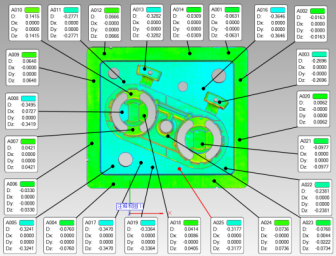
4、結果顯示
將工件成品的三維模型和三維設計數模進行ICP配準,進行偏差對比分析,判斷其偏差是否在容差范圍內,輸出工業檢測報告。
 返回頂部
返回頂部


